



{kind=link}
{kind=link}
The Pasta Matrix Reaching Task is used to assess the skilled reaching performance of rodents, including their ability to reach for different directions and distances and the range of movement of their limbs.
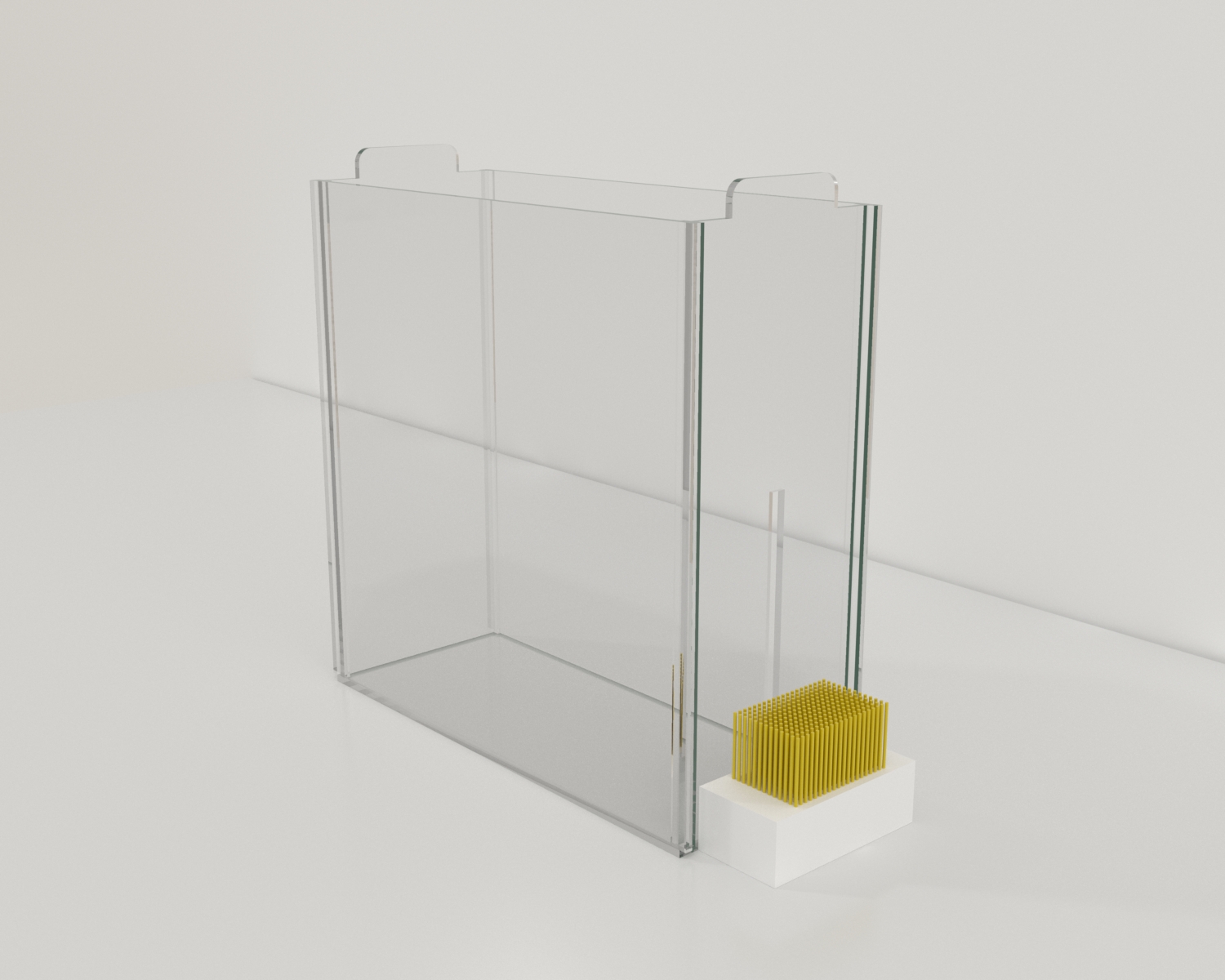
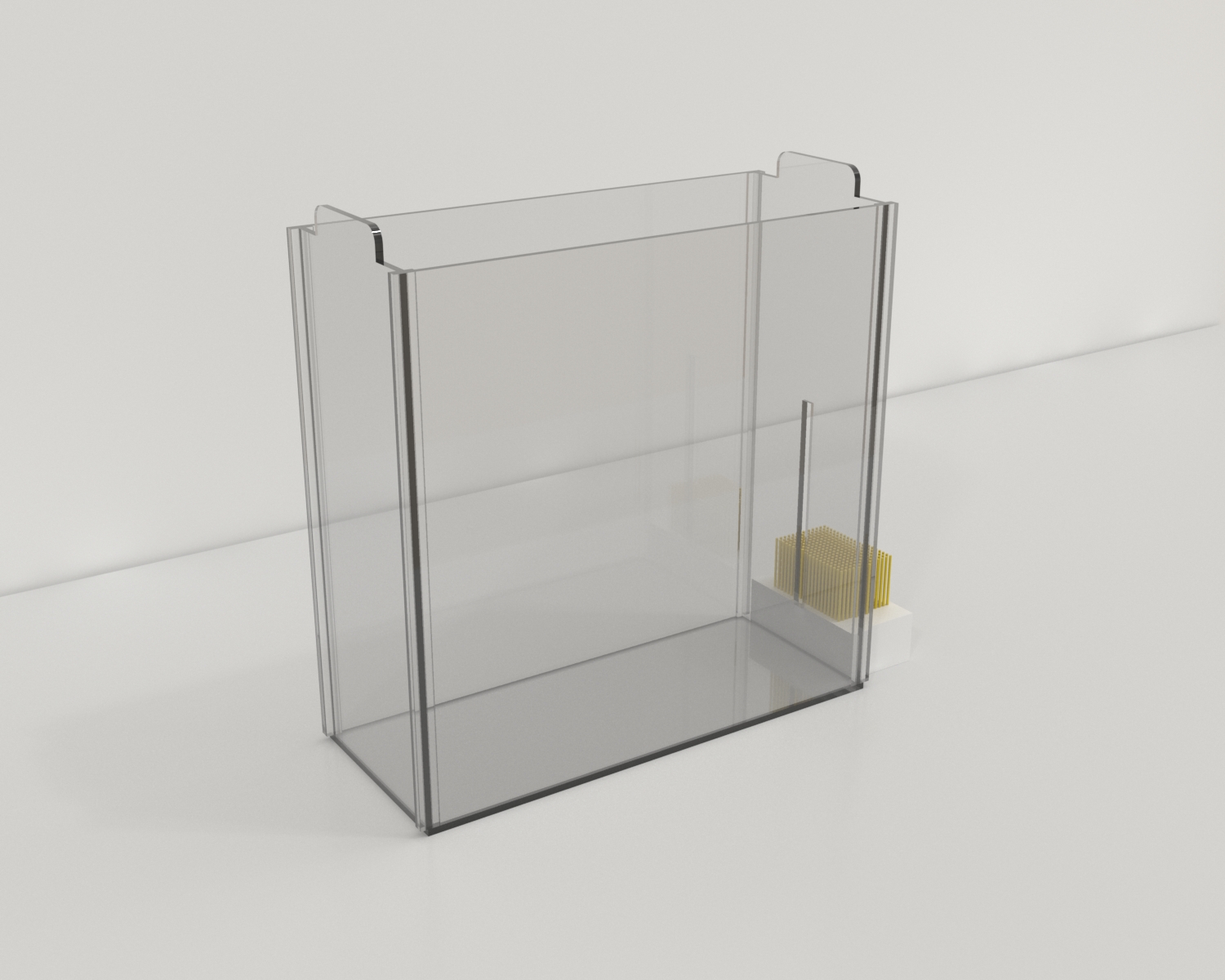
The apparatus consists of a chamber with a vertical slit that opens into a shelf containing an array of holes for placing up to 260 pieces of uncooked pasta. During the task, the subject is placed in the chamber and must retrieve each pasta piece through the vertical slit using its forelimbs. Since the pasta is arranged in a matrix distal and lateral to the reaching chamber aperture, the subject must alter its reach trajectory to obtain each piece of pasta.
MazeEngineers offer the Pasta Matrix Reaching Task. Customizations are available upon request.