Human robot interaction movement tracking for proxemics and task studies
Synchronize human movement measures with robot state and task events for human-robot interaction and social robotics research.
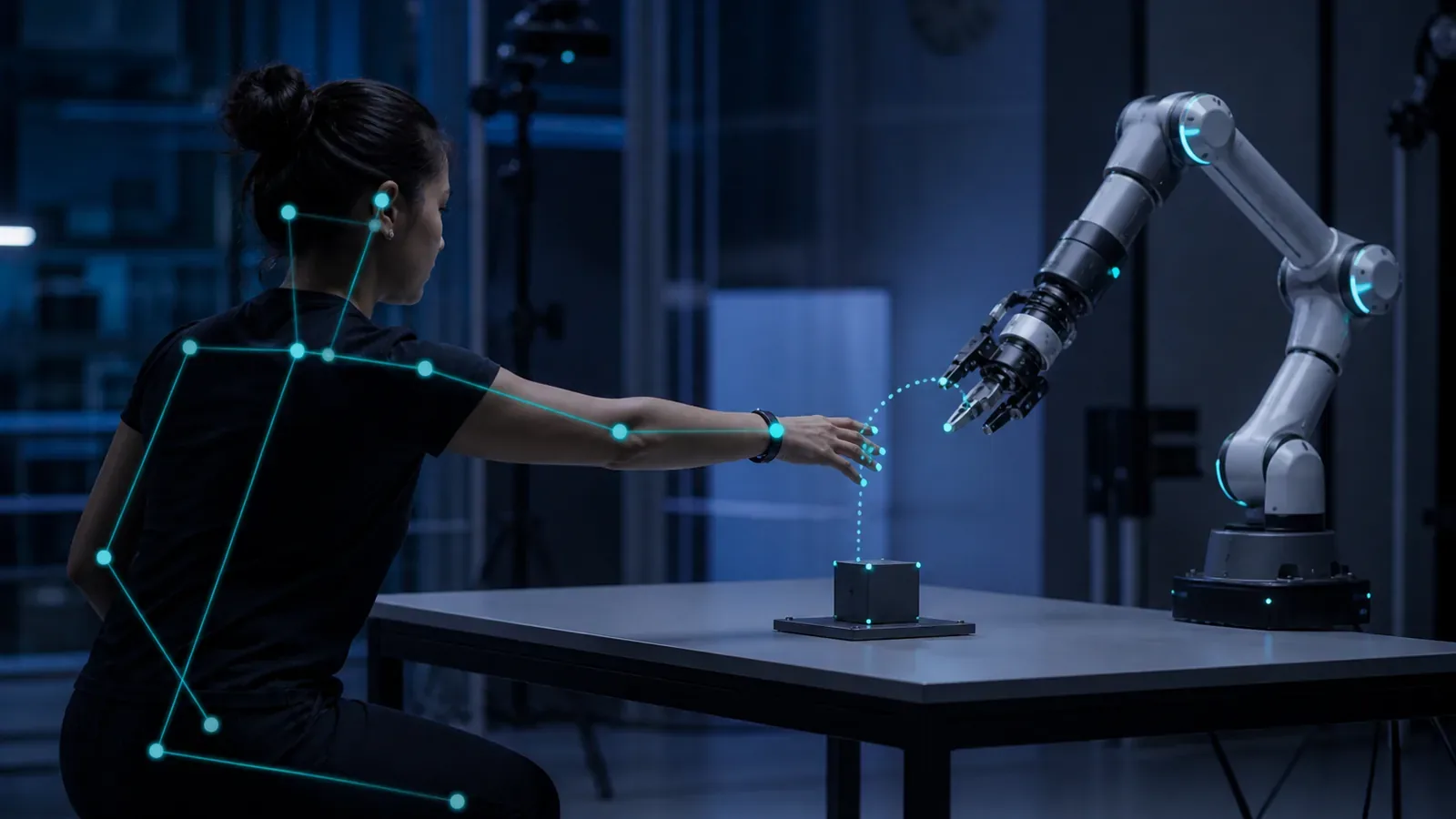
What the camera can measure
These outputs are designed for study comparison, rater review, and statistical analysis. They are not diagnostic claims.
Proxemic distance
participant position relative to robot or target area
Gesture timing
arm/hand movement after robot or researcher prompt
Orientation event
head, trunk, or gaze-direction proxy toward robot or object
Robot-state alignment
movement event timestamp matched to robot log state
Build the task around your protocol
ConductVision works best when the task, camera setup, annotations, and export fields are defined before the first participant visit.
Task presets
- approach distance
- gesture response
- shared task
- turn-taking
- robot-assisted instruction
Researcher annotations
- robot state
- task prompt
- interaction phase
- safety zone
- rater note
Export fields
- proxemic distance
- gesture timing
- orientation events
- task phases
- robot-state alignment
Camera setup
Wide lab view with participant, robot, target objects, and safety boundary visible.
Metrics, video signals, and comparators
What is established
Human-robot interaction research often analyzes proxemics, gesture, attention, timing, and synchronized robot-state data.
What ConductVision quantifies
ConductVision measures visible human movement and event timing that can be aligned to robot logs and rater coding.
What still needs validation
Engagement interpretation, safety conclusions, and social-behavior labels require study-specific coding rules and review.
Reviewable data for analysis teams
Exports are built for study notebooks, statistical analysis, and rater review. The video remains available for audit when the protocol allows it.
Scientific context for the task family
These links point to the measurement areas researchers commonly use when validating a protocol.
Research-use measurement note
ConductVision outputs are research-use measurements unless a customer has completed their own clinical validation, regulatory review, and intended-use controls. The study team remains responsible for consent, privacy, camera calibration, rater review, and clinical interpretation.
Adjacent human movement pages
Occupational ergonomics
Measure posture, reach, lift, repetition, workstation exposure, and task duration from workplace video.
Open pageAutism and social attention
Measure gaze orientation, joint attention events, gesture timing, and task engagement with careful review.
Open pageReaction time and psychomotor slowing
Measure reaction time, initiation latency, movement speed, vigilance lapses, and task consistency.
Open pageTelemedicine movement assessment
Guide home video capture, quality checks, task review, and exportable movement measures.
Open pageBring human-robot interaction into a real study protocol
Share the task, participant population, camera constraints, and outcomes you need to compare. We will help map what can be measured and what needs validation.