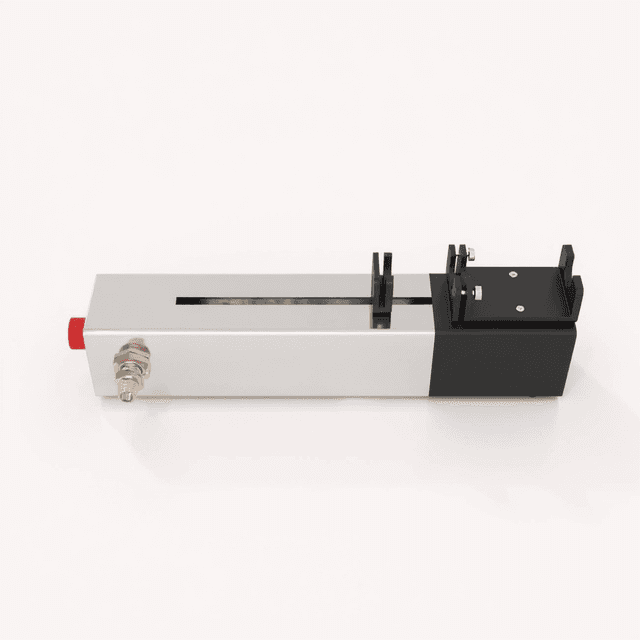
Motorized Micromanipulator
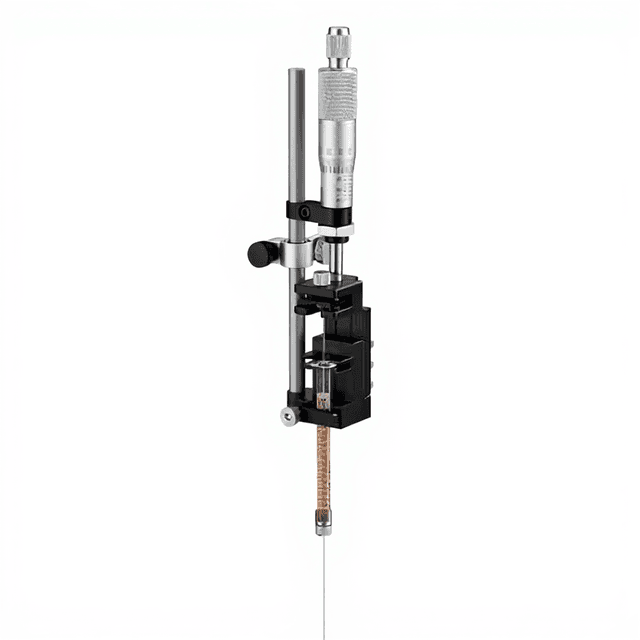
The MM-500 is designed to meet the diverse positioning needs of the scientific community for patch-clamp experiments, extracellular recording, microinjection, intracellular recording, and precision robotic positioning applications.
| manipulator_dimensions | 140×148×148 mm |
| controller_dimensions | 204×163×140 mm |
| encoder_dimensions | 153×123×87 mm |
| screen_size | 4.3 inch |
| maximum_travel_distance | 25 mm (X, Y, Z and diagonal) |
| maximum_moving_speed | 2.9 mm/s |
Features
-
- Small size, Mechanical manipulator (L×W×H)140×148×148 mm, Controller (L×W×H)204×163×140 mm, Rotary photoelectric encoder (L×W×H)153×123×87 mm.
- The TFT 4.3 inch touch screen shows the position and moving speed of the activated manipulator as well as X, Y and Z.
- High-resolution stepper motor meets four-axis drive, the maximum distance of X, Y, Z and diagonal movement is 25mm.
- The maximum moving speed is 2.9mm/s.
- The precision mechanical system allows sub-micron resolution to 0.132 μm in the coarse range and 33 nm in the fine range.
- Good stability and small drift, long Term Stability<10nm /h at 24℃.
- Axes positions are continuously shown in relative or absolute scales, and are easily readable on the screen.
- A rotary photoelectric encoder can control two manipulators and switch freely.
- Origin/working position function can meet the requirement of rapid return of electrode to original position/working position.
- High repeatable positioning accuracy:Single axis ≤1μm, three axis ≤2μm.
- Switch continuous increment or step increment mode directly by pressing the key.
How It Works
The RWD-MM500 operates through a high-resolution stepper motor system that provides four-axis drive control (X, Y, Z, and diagonal movement) with maximum travel distance of 25mm in each direction. The system utilizes precision mechanical components to achieve positioning resolution down to 33 nm in fine range mode, while maintaining long-term stability of <10 nm/h at 24°C through thermal compensation and mechanical design.
Control is achieved through a rotary photoelectric encoder that can manage up to two manipulators simultaneously, allowing researchers to switch between manipulator arms during complex experimental procedures. The touch screen interface displays real-time position data in both relative and absolute coordinate systems, enabling precise navigation to predetermined locations and storage of working positions for experimental protocols requiring repeated positioning.
The system operates in either continuous increment mode for smooth movement or step increment mode for precise positional adjustments, with maximum movement speeds up to 2.9mm/s for efficient positioning between experimental locations.
Features & Benefits
manipulator_dimensions
- 140×148×148 mm
controller_dimensions
- 204×163×140 mm
encoder_dimensions
- 153×123×87 mm
screen_size
- 4.3 inch
maximum_travel_distance
- 25 mm (X, Y, Z and diagonal)
maximum_moving_speed
- 2.9 mm/s
motor_type
- High-resolution stepper motor
drive_axes
- Four-axis
long_term_stability
- <10 nm/h at 24°C
position_display
- Relative or absolute scales
control_capability
- Controls two manipulators
movement_modes
- Continuous increment or step increment
Device Type
- One Arm
- Two Arms
Automation Level
- semi-automated
Accuracy
- 0.132 μm coarse range, 33 nm fine range
- Single axis ≤1μm, three axis ≤2μm
Display Type
- TFT touch screen
Dimensions
- 204 mm x 163 mm x 148 mm
Brand
- RWD
Research Domain
- Behavioral Pharmacology
- Cell Biology
- Developmental Biology
- Learning and Memory
- Neuroscience
- Pain Research
Species
- Gerbil
- Hamster
- Rabbit
- Mouse
- Rat
- Guinea pig
Weight
- 8.27 lbs
Dimensions
- L: 34.0 in
- W: 39.0 in
- H: 33.0 in
Comparison Guide
| Feature | This Product | Typical Alternative | Advantage |
|---|---|---|---|
| Positioning Accuracy | ≤1μm single axis, ≤2μm three-axis | Entry-level models often provide 2-5μm accuracy | Higher accuracy enables more precise targeting of specific anatomical structures and reduces experimental variability. |
| Resolution Range | 0.132 μm coarse range, 33 nm fine range | Many systems offer single-range resolution only | Dual-range capability allows both rapid positioning and ultra-fine adjustments within the same system. |
| User Interface | 4.3-inch TFT touch screen with real-time position display | Basic models often use LED displays or simple controls | Touch screen interface provides intuitive control and immediate visual feedback of coordinate changes. |
| Multi-manipulator Control | Controls two manipulators with free switching | Most systems control single manipulator only | Enables complex bilateral procedures and coordinated multi-instrument experiments without additional controllers. |
| Travel Range | 25mm in X, Y, Z, and diagonal directions | Compact models may offer 10-15mm ranges | Larger working volume accommodates diverse experimental setups and sample sizes. |
| Long-term Stability | <10 nm/h at 24°C | Standard systems may exhibit higher drift rates | Superior stability maintains positioning accuracy during extended experimental sessions without recalibration. |
The RWD-MM500 combines sub-micron positioning accuracy with intuitive touch screen control and dual-manipulator capability. The system's dual-range resolution and exceptional long-term stability provide researchers with both precision and reliability for demanding micromanipulation applications.
Practical Tips
Perform initial accuracy verification using a calibrated reference standard before beginning experimental protocols.
Why: Ensures the reported positioning accuracy specifications are maintained in your specific laboratory environment.
Keep the mechanical components clean and protect the touch screen from chemical exposure during procedures.
Why: Prevents contamination buildup that could affect movement precision and maintains display sensitivity.
Allow the system to temperature equilibrate for 30 minutes before beginning precision positioning work.
Why: Thermal stability directly impacts the <10 nm/h drift specification and overall positioning accuracy.
Use the working position memory function to store critical experimental coordinates at the beginning of each session.
Why: Enables rapid return to key locations and maintains consistency across experimental trials.
If position accuracy appears reduced, check for mechanical vibrations in the mounting surface and surrounding environment.
Why: External vibrations can interfere with the precision mechanical system and affect positioning stability.
Switch between continuous and step increment modes based on the required positioning precision for each experimental phase.
Why: Optimizes movement control for both rapid positioning and fine adjustments within the same protocol.
Set software travel limits within the physical boundaries of your experimental setup to prevent collisions.
Why: Protects both the manipulator and experimental apparatus from damage during automated or rapid movements.
Setup Guide
What’s in the Box
- Mechanical manipulator unit (140×148×148 mm) (typical)
- Controller unit with 4.3-inch TFT touch screen (204×163×140 mm) (typical)
- Rotary photoelectric encoder (153×123×87 mm) (typical)
- Connection cables and power adapter (typical)
- User manual and software documentation (typical)
- Calibration certificate (typical)
Warranty
ConductScience provides a one-year manufacturer warranty covering defects in materials and workmanship, with technical support for setup, calibration, and troubleshooting throughout the warranty period.
Compliance
References
Background reading relevant to this product:
What is the maximum positioning accuracy achievable with this manipulator?
The system achieves ≤1μm accuracy on single axes and ≤2μm accuracy across three axes, with resolution down to 33 nm in fine range mode for ultra-precise positioning applications.
Can the manipulator control multiple instruments simultaneously?
Yes, the rotary photoelectric encoder can control two manipulators and switch freely between them, enabling complex experimental protocols requiring coordination of multiple instruments.
How stable is the positioning over long experimental sessions?
The system maintains long-term stability of <10 nm/h at 24°C, ensuring consistent positioning accuracy during extended recording or injection protocols.
What coordinate systems are available for position tracking?
The touch screen displays positions in both relative and absolute coordinate scales, allowing researchers to work in their preferred reference frame for experimental protocols.
How fast can the manipulator move between positions?
Maximum movement speed is 2.9mm/s, providing efficient positioning between experimental locations while maintaining precision control throughout the movement.
Does the system remember specific working positions?
Yes, the origin/working position function stores predetermined coordinates for rapid return to specific experimental locations, ensuring consistent placement across trials.
What movement modes are available for different experimental needs?
The system supports both continuous increment mode for smooth movements and step increment mode for precise positional adjustments, selectable directly through key press.
Have a question about this product?
Accessories
Enhance your setup with compatible accessories