$4,590.00–$6,590.00Price range: $4,590.00 through $6,590.00
The learned helplessness paradigm is a widely used animal model of depression originally described by Overmier and Seligman (1967), who observed that exposure to inescapable shock resulted in dramatic deficits in emotional expression, associative learning, and behavioral coping when presented to an aversive but escapable stimulus. The MazeEngineers learned helplessness apparatus is designed to maximize your time and grant dollars for data output. The device can be configured with multiple shock configurations and also flexible contextual cues means the use of operant conditioning in the learned helplessness experiments. Integration with Conductor means Neuralynx and Ethovision seamless software integration without I/O boxes.
Adjustable Plating System allows modifications to different colors and patterns for contextual cues
Comes with 1 color. Please inquire about additional patterns
Shock
Smooth DC Shock Delivery
Output Current: 0 – 4mA (adjustable in .1mA increments)
Voltage: 163V (direct current)
Product Overview
Storage Included
Assembly Required
Warranty Length : 1 YEAR!
Introduction
The learned helplessness paradigm serves as a well-established animal model for studying depression, initially conceptualized by Overmier and Seligman in 1967. They observed that exposure to uncontrollable shock led to profound deficits in emotional response, associative learning, and coping behaviors when confronted with an aversive yet escapable stimulus. This model, refined primarily for mice and rats by Vollmayr and Henn (2001) and Chourbaji et al. (2005), induces a state of helplessness selectively in certain animals, reflecting varying predispositions to depression among subjects.
Animals exhibiting learned helplessness display symptoms akin to depression, such as decreased body weight and sexual activity, altered REM sleep patterns, and heightened levels of corticotropin-releasing factor and corticosterone (Yan et al., 2010). Interestingly, they also show increased fear response, aggression, gastric ulcers, and opiate-mediated analgesia, as extensively reviewed by Vollmayr and Gass (2013).
This model has been validated pharmacologically using antidepressants, which effectively reduce escape latency and the incidence of helpless behavior (Sherman et al., 1982; Chourbaji et al., 2005). Such findings underscore the predictive validity of the learned helplessness paradigm in assessing antidepressant efficacy.
In experimental settings, animals are subjected to randomized mild shocks, typically applied to the tail or foot within a conditioning chamber featuring a floor of conductive steel rods. A conditioned stimulus, such as a tone or light signal, often precedes the shock application.
Researchers commonly assess parameters such as the number of escape failures, latency to escape, and responses indicative of active and passive avoidance (Yin et al., 2016). These measures serve as reliable markers for evaluating depressive-like behaviors in animal subjects.
Apparatus and Equipment
To conduct the learned helplessness model, essential equipment includes a shock generator and a conditioning chamber equipped with a floor designed to deliver electric shocks via steel rods.
The dimensions of the conditioning chamber are adjustable based on the species and size/weight of the animals involved. Vollmayr and Henn (2001) utilized chambers with interior dimensions of either 25 x 30 x 21.5 cm (small) or 48.5 x 30 x 21.5 cm (large) for rats. For mice, Chourbaji (2005) employed two compartments measuring 18 x 18 x 30 cm³ each in a two-way avoidance protocol (see Modifications).
The chamber walls can be constructed from steel to prevent shock avoidance or from plexiglass (Vollmayr and Henn, 2001; Chourbaji et al., 2005). If steel walls are used, it's recommended to include at least one plexiglass wall with an electrified grid overlay for observational purposes.
The chamber floor should consist of steel rods. Vollmayr and Henn (2001) used rods with a diameter of 6 mm spaced 20 mm apart for rats, whereas Chourbaji et al. (2005) employed rods with a 5 mm diameter and 6 mm spacing for mice.
Infrared-light beams can be positioned at the chamber floor to monitor spontaneous shuttle responses to light (conditioned response) and behavioral reactions to electric shocks (unconditioned), as described by Chourbaji et al. (2005).
Training Protocol
Ensuring precise control over shock administration is paramount. Learned helplessness is induced by administering inescapable electric shocks either to the foot (Chourbaji et al., 2005) or tail (Drugan et al., 1997). Tailored escape tasks should be of moderate difficulty, tailored to each species, to optimize the induction of helplessness without affecting too few or too many animals.
The experimental protocol comprises three phases: induction of depressive-like symptoms, recovery, and testing. Typically, two control groups are employed to assess the impact of uncontrollable stress (Drugan et al., 1997). One group remains unstressed, while the other receives uncontrollable shocks. Animals exposed to uncontrollable stress are "yoked" to counterparts receiving controllable shocks, ensuring shocks of identical intensity, duration, and frequency. Randomizing inescapable shocks minimizes predictability during induction, enhancing the likelihood of chronic depressive-like symptoms.
When transferring animals to the conditioning chamber, handlers should avoid lifting them by the tail. It’s crucial to maintain consistent procedures across all experimental groups. Ambient lighting in the experimental area should be minimized.
Various experimental protocols exist. For instance, Chourbaji et al. (2005) conducted shock procedures over two consecutive days in mice, with each session lasting approximately 52 minutes. They administered 360 randomized footshocks (0.150 mA, 1-3 seconds duration, intervals of 1-15 seconds). In contrast, Vollmayr and Henn (2001) conducted a single 40-minute session (0.8 mA, total shock duration 20 minutes, intervals of 5-15 seconds). Yin et al. (2016) recommend an induction phase comprising 60 trials.
During shock procedures, animals should be closely monitored. Factors such as fur resistance, fecal bolus between rods, and the animal’s posture and contact specificity with the rods (e.g., sitting on rods with the same potential, placing paws between rods or on non-electrified walls) can affect shock efficiency (Vollmayr and Henn, 2001). After each session, the chamber should be cleaned using 70% ethanol, and animals should be returned to their home cages.
The evaluation of learned helplessness typically commences 24 hours post-shock procedure to facilitate memory consolidation. The number of test days and session durations are adaptable variables. For instance, Vollmayr and Henn (2001) administered 15 shocks lasting 60 seconds each, with intervals of 24 seconds (phase duration of 200 ms and intensity of 0.8 mA) in rats. Chourbaji et al. (2005) employed a 5-second initial light stimulus followed by a maximum 10-second shock (inter-trial interval of 30 seconds). Conversely, Yin et al. (2016) suggest trials of approximately 3 seconds each, repeated 30 times per day over 3 days.
Session length should be tailored based on the animals’ learning capacity within the paradigm. Following each session, it’s essential to clean the chamber thoroughly and return the animals to their respective home cages.
When transferring animals to the conditioning chamber, handlers should avoid lifting them by the tail. It's crucial to maintain consistent procedures across all experimental groups. Ambient lighting in the experimental area should be minimized.
Various experimental protocols exist. For instance, Chourbaji et al. (2005) conducted shock procedures over two consecutive days in mice, with each session lasting approximately 52 minutes. They administered 360 randomized footshocks (0.150 mA, 1-3 seconds duration, intervals of 1-15 seconds). In contrast, Vollmayr and Henn (2001) conducted a single 40-minute session (0.8 mA, total shock duration 20 minutes, intervals of 5-15 seconds). Yin et al. (2016) recommend an induction phase comprising 60 trials.
During shock procedures, animals should be closely monitored. Factors such as fur resistance, fecal bolus between rods, and the animal's posture and contact specificity with the rods (e.g., sitting on rods with the same potential, placing paws between rods or on non-electrified walls) can affect shock efficiency (Vollmayr and Henn, 2001). After each session, the chamber should be cleaned using 70% ethanol, and animals should be returned to their home cages.
The evaluation of learned helplessness typically commences 24 hours post-shock procedure to facilitate memory consolidation. The number of test days and session durations are adaptable variables. For instance, Vollmayr and Henn (2001) administered 15 shocks lasting 60 seconds each, with intervals of 24 seconds (phase duration of 200 ms and intensity of 0.8 mA) in rats. Chourbaji et al. (2005) employed a 5-second initial light stimulus followed by a maximum 10-second shock (inter-trial interval of 30 seconds). Conversely, Yin et al. (2016) suggest trials of approximately 3 seconds each, repeated 30 times per day over 3 days.
Session length should be tailored based on the animals' learning capacity within the paradigm. Following each session, it's essential to clean the chamber thoroughly and return the animals to their respective home cages.
Modifications
Numerous modifications have been documented regarding the learned helplessness protocol, encompassing variations in the intensity and duration of electric shocks, the number of sessions and trials, intervals between stimuli, and the utilization of conditioned and unconditioned stimuli during the testing phase (summarized by Yin et al., 2016).
In their experimental setup, Vollmayr and Henn (2001) enabled rats to terminate shocks during testing by pressing a lever positioned within the chamber, accompanied by a white signal light (12W) to aid navigation. Conversely, Chourbaji et al. (2005) employed a separate chamber setup to facilitate escape from shocks for mice.
Control animals promptly terminate the trial (rats) or escape (mice) when exposed to mild shocks. In contrast, animals exhibiting helplessness fail to terminate the trial and endure the stress passively. Vollmayr and Henn (2001) define learned helplessness as a minimum of 10 failures to terminate shocks, contrasting with fewer than five failures categorized as "non-learned helplessness." Each test day assesses the number of termination failures and the latency to terminate the trial post-shock application, serving as depression markers (Vollmayr and Henn, 2001; Chourbaji et al., 2005; Yin et al., 2016). Additionally, active avoidance (terminating shocks during the trial) and passive avoidance responses (anticipating stressors) are scored, used to gauge locomotor activity and instrumental learning (Yin et al., 2016).
Traditionally, two control groups are employed to investigate the impact of uncontrollable stress (Drugan et al., 1997). One group remains unstressed, while the other controls shocks via lever pressing. Animals exposed to uncontrollable stress are "yoked" to counterparts receiving controllable shocks, ensuring identical shock parameters (intensity, duration, and pattern).
To mitigate variability in pain sensitivity, a hotplate test may be conducted (Chourbaji et al., 2005).
Adaptations for non-mammalian species, such as flies (Batsching et al., 2016) and zebrafish (Okamoto et al., 2012), have also been reported.
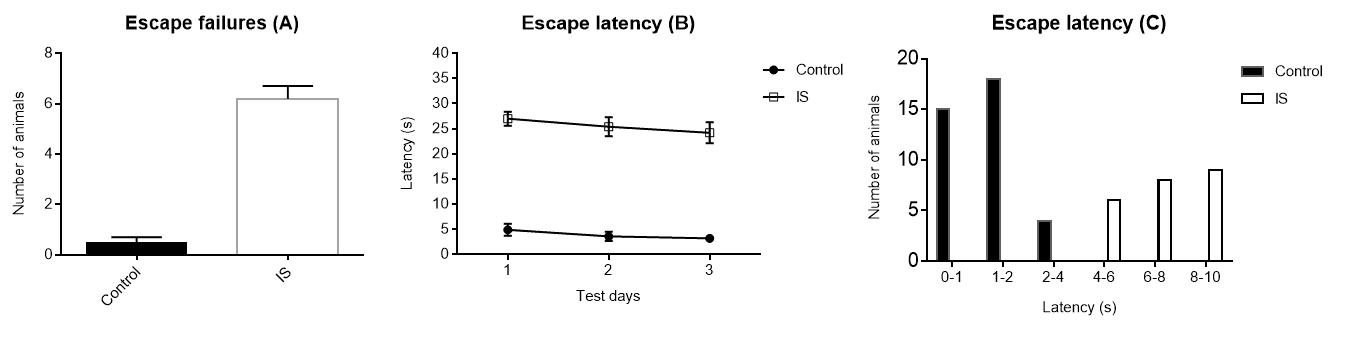
Sample Data
The learned helplessness model typically yields results in terms of failure counts (A) and escape latencies (B and C). These data can be presented as group averages (A and B) or categorized into intervals based on latency or number of failures (C). Additionally, graphs can illustrate variations in responses across multiple test days (B). Presented below are graphs depicting two sample groups: a control group and a group exposed to inescapable stress (IS). Results for A and B are shown as mean ± standard error of the mean:
Strengths and Limitations
The learned helplessness model of depression has been robustly confirmed through validation with antidepressants, demonstrating a spectrum of behaviors and symptoms akin to major depression. Importantly, the alleviation of depressive-like symptoms is specific to antidepressants, as anxiolytics do not replicate these effects (Yin et al., 2016). Thus, this model stands as a potent instrument for elucidating the symptomatology of depression in humans.
Developing a comprehensive protocol for the learned helplessness model has posed significant challenges, exacerbated by inconsistencies across different laboratories (Musty et al., 1990; Yan et al., 2010). Recent studies have made substantial strides in addressing these issues (Vollmayr and Henn, 2001; Chourbaji et al., 2005). Another notable limitation is that depressive symptoms induced by inescapable shock often do not persist beyond the termination of the stimulus (Cryan et al., 2002). However, compared to the forced-swim test, which typically requires multiple administrations of antidepressants to reverse symptoms (Takamori et al., 2001), the learned helplessness model provides a more sustained measure of antidepressant efficacy. Additionally, variability between different strains of animals has been documented (Yan et al., 2010).
The learned helplessness model of depression has been robustly confirmed through validation with antidepressants, demonstrating a spectrum of behaviors and symptoms akin to major depression. Importantly, the alleviation of depressive-like symptoms is specific to antidepressants, as anxiolytics do not replicate these effects (Yin et al., 2016). Thus, this model stands as a potent instrument for elucidating the symptomatology of depression in humans.
Developing a comprehensive protocol for the learned helplessness model has posed significant challenges, exacerbated by inconsistencies across different laboratories (Musty et al., 1990; Yan et al., 2010). Recent studies have made substantial strides in addressing these issues (Vollmayr and Henn, 2001; Chourbaji et al., 2005). Another notable limitation is that depressive symptoms induced by inescapable shock often do not persist beyond the termination of the stimulus (Cryan et al., 2002). However, compared to the forced-swim test, which typically requires multiple administrations of antidepressants to reverse symptoms (Takamori et al., 2001), the learned helplessness model provides a more sustained measure of antidepressant efficacy. Additionally, variability between different strains of animals has been documented (Yan et al., 2010).
Summary and Key Points
The learned helplessness paradigm is a widely used model of depression that can be used for transgenic, behavioral, and pharmacological studies.
It is based on the observation that when faced with an inescapable aversive stimulus, animals develop subsequential coping deficits to a new aversive but escapable stressor.
Animals are subjected to randomized mild electric shocks. Helpless animals will not terminate the trial or escape but rather accept the inescapable stressor.
Test scoring entails number of escape or termination failures, latency to escape or terminate the trial after application of shock, active avoidance (exit or termination during shock) and passive avoidance responses (accounting for anticipation of stressor).
The protocol can be adjusted to fit study specificities and has been consistently validated with anti-depressants.

 Take advantage of Neuralynx, Ethovision Integration, SMS and Email integration with the Conductor Science Software. No I/O Boxes Required
Learn More
Take advantage of Neuralynx, Ethovision Integration, SMS and Email integration with the Conductor Science Software. No I/O Boxes Required
Learn More