Morris Water T Maze Insert
Aluminum and Plexiglas insert that converts Morris Water Maze pools into T-shaped cognitive assessment platforms for evaluating spatial decision-making and perseverative behavior in rodents.

Louise Corscadden, PhD
Director of Science · ConductScience
Ask Louise about Morris Water T Maze Insert fit, setup, configuration, or quote prep.
Already working with us? Sign in to connect this with My Scientist.
Key Specifications
Full details →- Model fit
- Mouse, Rat
- SKU family
- ME-3126/ 3128
- Sizing
- 43.2 x 38.0 x 27.9 cm
- Ordering
- Online checkout and quote request available
- Category
- Behavioral Mazes
- Build notes
- Aluminum, Plexiglas
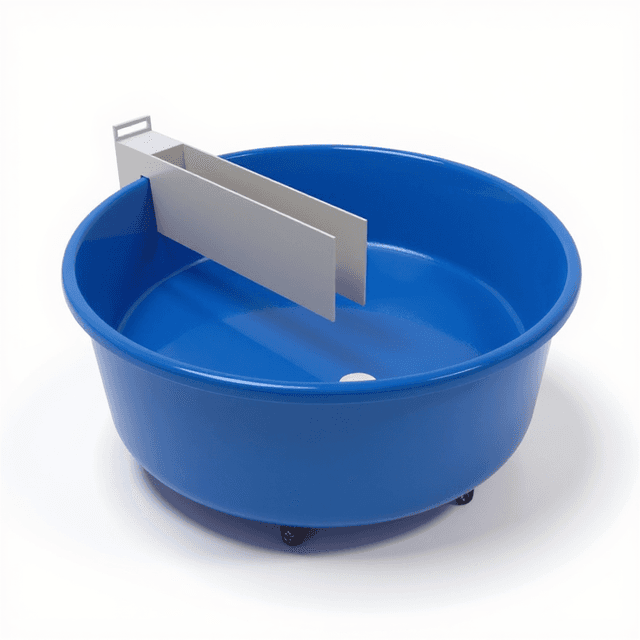
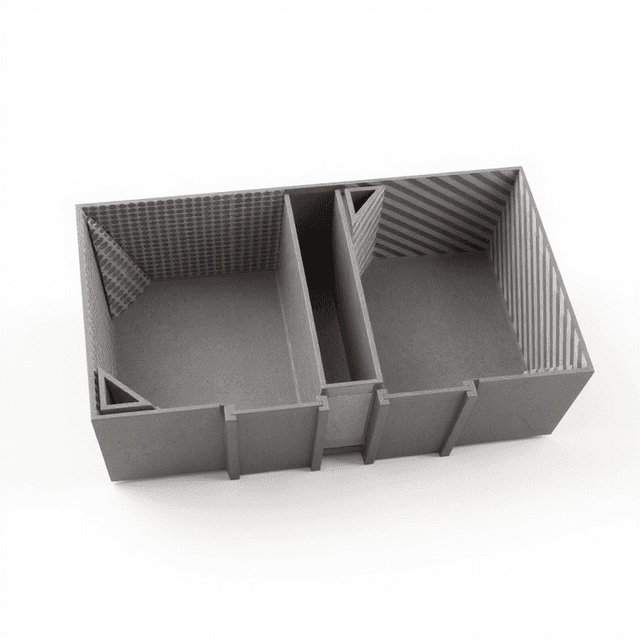
The Morris Water T Maze Insert transforms the traditional Morris Water Maze into a hybrid cognitive assessment platform, combining aquatic navigation with discrete choice architecture. This aluminum and Plexiglas insert creates a T-shaped configuration within circular pools, enabling researchers to evaluate spatial decision-making, perseverative behavior, and working memory without food deprivation protocols.
The system addresses limitations of conventional spatial memory assessments by providing a high-throughput approach to measuring cognitive flexibility and spatial reference memory. The insert's standardized dimensions accommodate multiple pool sizes while maintaining consistent experimental parameters across laboratories. Each trial presents subjects with binary spatial choices, generating quantifiable metrics of learning acquisition, memory retention, and behavioral adaptation.
How It Works
The Morris Water T Maze Insert operates on principles of spatial navigation and choice-based learning paradigms. The insert creates a T-shaped pathway within the circular pool, with arms extending 18.5 cm from a central decision point. Subjects begin each trial at the base of the T and must navigate to one of two choice arms to locate a submerged escape platform positioned 1 cm below the water surface.
Cognitive assessment occurs through systematic manipulation of platform location and analysis of choice patterns. The aquatic environment eliminates olfactory cues while maintaining motivation through escape behavior, similar to traditional Morris Water Maze protocols. The binary choice structure enables precise measurement of perseverative responses, alternation behavior, and adaptation to changing reward contingencies. Water temperature maintained at 23°C ensures consistent motivation levels across trials without thermal stress.
Data collection focuses on choice accuracy, escape latency, and behavioral persistence patterns. The standardized trial structure (60-second maximum duration, 10-second platform rest, 7-10 minute inter-trial intervals) provides reliable metrics for comparing cognitive performance across treatment groups and experimental conditions.
Features & Benefits
circular_pool_diameter
- 45 cm
t_maze_arm_length
- 18.5 cm
t_maze_arm_width
- 5 cm
escape_platform_dimensions
- 5 x 5 cm
water_level
- 13 cm
platform_submersion_depth
- 1 cm
operating_temperature
- 23°C
trial_duration
- 60 seconds
platform_rest_time
- 10 seconds
inter_trial_interval
- 7 to 10 minutes
trials_per_day
- 10
training_duration
- 4 days
success_criterion
- 8 correct out of 10 trials per day for 4 consecutive days
Behavioral Construct
- spatial learning
- working memory
- reference memory
- perseverative behavior
- cognitive flexibility
- decision-making
Automation Level
- manual
Material
- Aluminum
- Plexiglas
Dimensions
- 18.5 cm x 5 cm
Research Domain
- Addiction Research
- Aging Research
- Behavioral Pharmacology
- Learning and Memory
- Neurodegeneration
- Neuroscience
Species
- Mouse
- Rat
Compatible Tracking Software
- ConductVision
Weight
- 21.0 kg
Dimensions
- L: 43.2 mm
- W: 38.0 mm
- H: 27.9 mm
| Feature | This Product | Typical Alternative | Advantage |
|---|---|---|---|
| Choice Architecture | Binary T-shaped configuration with 18.5 cm arms | Circular pools require complex spatial mapping or multiple choice points | Simplifies behavioral analysis and enables clear quantification of decision-making patterns. |
| Motivation System | Aquatic escape behavior without food deprivation | Dry mazes often require food restriction protocols | Eliminates welfare concerns and weight management protocols while maintaining consistent drive levels. |
| Trial Structure | 60-second maximum duration with standardized inter-trial intervals | Variable trial lengths often depend on subject behavior | Provides consistent temporal parameters for statistical analysis and cross-study comparisons. |
| Construction Materials | Aluminum and Plexiglas hybrid construction | All-plastic or all-metal designs vary in durability and visibility | Combines structural durability with optical transparency for behavioral observation and video analysis. |
| Pool Compatibility | Multiple size options (4, 5, and 6-foot pools) | Fixed configurations limit laboratory integration options | Enables integration with existing Morris Water Maze infrastructure without equipment replacement. |
| Success Criteria | 8 correct out of 10 trials per day for 4 consecutive days | Learning criteria vary widely across maze designs | Provides standardized performance benchmarks for reproducible cognitive assessment protocols. |
The Morris Water T Maze Insert provides a standardized hybrid approach to spatial cognitive assessment, combining the motivation advantages of aquatic testing with the analytical clarity of binary choice architecture. The system's compatibility with multiple pool sizes and standardized protocols facilitates integration into existing research infrastructure while providing reliable metrics for cognitive flexibility and spatial memory evaluation.
| Model | SKU | Listed price | Status | Dimensions |
|---|---|---|---|---|
| Rat | ME-3128 | $2,290.00 | Available | 43.2 x 38.0 x 27.9 cm |
| Mouse | ME-3126 | $2,290.00 | Available | 43.2 x 38.0 x 27.9 cm |
Practical Tips
Verify platform submersion depth at 1 cm below surface level before each session using a ruler measurement from multiple angles.
Why: Consistent platform depth ensures uniform escape difficulty and prevents visual detection that could bias choice behavior.
Clean maze surfaces with dilute bleach solution between subjects and thoroughly rinse to eliminate odor cues.
Why: Residual scent marks from previous subjects can create spatial biases that confound cognitive assessment results.
Randomize platform location between choice arms according to predetermined sequences to prevent position bias development.
Why: Systematic randomization prevents subjects from adopting non-spatial response strategies that would mask true cognitive performance.
If subjects show persistent thigmotaxis (wall-following), extend habituation period with guided platform exposures.
Why: Initial anxiety responses can mask cognitive abilities and lead to false negative assessments of spatial learning capacity.
Monitor for floating behavior or passive escape strategies that indicate motivational issues rather than cognitive deficits.
Why: Distinguishing between cognitive impairment and motivational factors is critical for accurate interpretation of behavioral results.
Maintain consistent handler and testing time to minimize circadian rhythm effects on cognitive performance.
Why: Biological rhythm variations can significantly impact learning and memory measures, affecting experimental reproducibility.
Monitor subjects continuously during trials and maintain toweling stations for immediate drying after platform rest periods.
Why: Preventing hypothermia and stress responses ensures subject welfare while maintaining data quality throughout testing sessions.
If choice patterns show extreme position bias, verify maze alignment and check for inadvertent environmental cues favoring one arm.
Why: Systematic position preferences often indicate experimental artifacts rather than true cognitive strategies.
Setup Guide
What’s in the Box
- Morris Water T Maze Insert (aluminum and Plexiglas construction)
- Escape platform (5 x 5 cm)
- Installation guide
- Protocol documentation (typical)
- Assembly hardware (typical)
Warranty
ConductScience provides a one-year manufacturer warranty covering construction defects and materials. Technical support includes protocol guidance and troubleshooting assistance for experimental setup optimization.
Compliance
References
Background reading relevant to this product:
What are the key performance metrics measured with this system?
Primary metrics include choice accuracy, escape latency, perseverative response frequency, and alternation behavior patterns. Success criterion is typically 8 correct choices out of 10 trials per day for 4 consecutive days.
How does this compare to traditional Morris Water Maze or dry T-maze protocols?
The hybrid design eliminates food deprivation requirements while providing clearer choice architecture than circular pools. It offers faster training than traditional Morris Water Maze while maintaining aquatic motivation advantages over dry mazes.
What pool sizes are compatible with the insert?
The system is manufactured to fit 4-foot, 5-foot, and 6-foot Morris Water Maze pools, with pricing at $1800 for 4-foot and $2100 for both 5-foot and 6-foot configurations.
What are the recommended environmental controls for consistent results?
Maintain water temperature at 23°C, establish uniform lighting conditions, eliminate spatial bias cues, and ensure quiet testing environment. Monitor temperature stability across pool surface for consistent motivation.
How many trials are needed for reliable cognitive assessment?
Standard protocols use 10 trials per day over 4 consecutive days, providing 40 total trials for learning curve analysis. This design enables both within-session and between-session performance comparisons.
What maintenance is required between experimental sessions?
Clean maze surfaces with appropriate disinfectant between subjects, verify water temperature stability, confirm platform positioning accuracy, and check for structural integrity of insert components.
Can the system accommodate both mouse and rat subjects?
Yes, the 18.5 cm arm length and 5 cm width accommodate both mice and rats, though researchers may need to adjust trial duration expectations based on species locomotion characteristics.
What video tracking considerations are important for data collection?
Position overhead cameras to capture entire maze area including choice point and both arms. Ensure sufficient contrast between subject and background for automated tracking accuracy, and calibrate tracking zones for each arm.
Have a question about this product?
Have a question? Just ask.
Send it over and we'll email you a personalized answer — no call, no scheduling.
Prefer to talk it through?
Accessories
Enhance your setup with compatible accessories